T.C. Mİllî Eğİtİm BakanlIğI
İSTANBUL / PENDİK - Cahit Zarifoğlu Ortaokulu

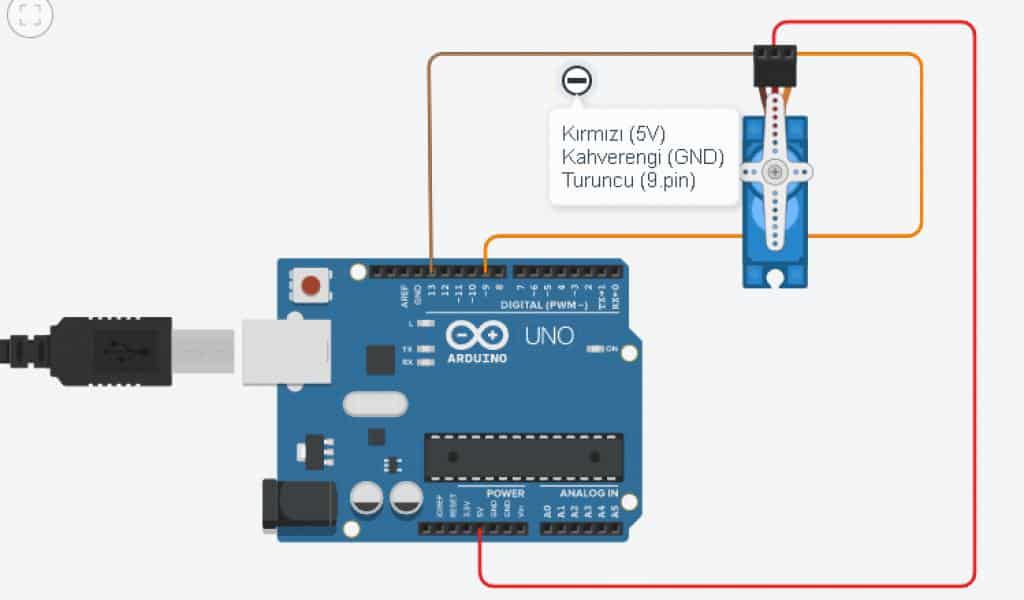
#include // Servo kutuphanesini projeye ekledik
Servo ServoMotor; // Servo motorumuza kodlarda ServoMotor adini verdik.
void setup()
{
ServoMotor.attach(9); // Servo motoru 9 numarali pine bagladik */
}
void loop()
{
ServoMotor.write(1); //Servo motorumuz 1. dereceye donuyor
delay(500);
ServoMotor.write(170); // Servo motorumuz 1. dereceye donuyor
delay(500);
}
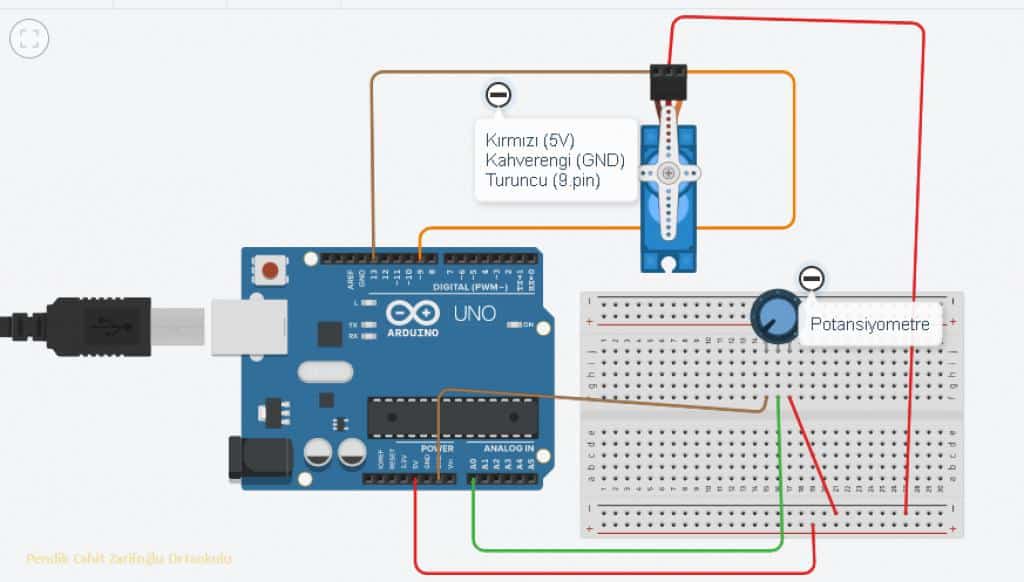
#include /* Servo kutuphanesi projeye dahil edildi */
Servo servoMotor; /* servo motor nesnesi yaratildi */
int Potansiyometre = A0; /* Potansiyometre pini belirlendi*/
int PotDeger; /* Potansiyometre degeri icin degisken olusturuldu */
void setup()
{
Serial.begin(9600);
servoMotor.attach(9); /* Servo motor 9 numarali pine baglandi */
}
void loop()
{
PotDeger = analogRead(Potansiyometre); /* Potansiyometrenin cikis gerilimi olculuyor */
PotDeger = map(PotDeger, 0, 1023, 0, 179);
/*
Potansiyometreden olculen 0 ve 1023 arasindaki deger map fonksiyonu ile
Servo motorun calisma araligina yani 0 ve 180 dereceye cevriliyor.
Bu fonksiyon 0 ve 1023 arasindaki degerleri, lineer olarak 0 ve 180 arasina cevirir
*/
servoMotor.write(PotDeger); /* Hesaplanan deger servo motora yollaniyor*/
Serial.println(PotDeger);
delay(15); /* Motorun konumunu almasi icin bir sure bekleniyor */
}